Linha de Fabrico
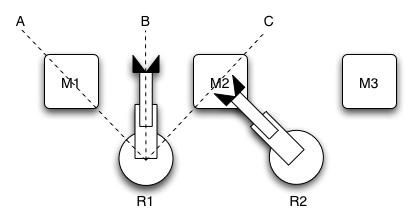
Pretende-se modelar um sistema de transporte de uma linha de fabrico. Esta é constituida por uma série de mesas, existindo um braço robotizado entre cada par de mesas. O braço pode estar em três posições diferentes (A, B e C), podendo mover-se para a esquerda ou para a direita. Também possui uma garra que lhe permtite apanhar uma peça numa mesa e transportá-la para a seguinte. Considere também que existe um produtor que coloca as peças na primeira mesa e um consumidor que as retira da última.
Algumas das propriedades que o sistema modelado deve verificar são:
- Cada mesa pode conter no máximo uma peça.
- Não deve possível colocar uma peça na mesa i se o robot i está na posição A.
- Nomeadamente, nunca deve ser possível o robot i estar na posição C e o robot i+1 na posição A.
- Os motores de deslocamento para a esquerda e para a direita não podem estar activos simultaneamente.
- Qualquer peça que seja colocada na primeira mesa deve eventualmente chegar á última.
- Não existem deadlocks.